Univrses可能已经解决了虚拟现实移动端定位追踪问题

在去年Oculus Connect开发者大会上,Oculus CTO John Carmack表示虚拟现实移动端定位追踪是他当下想要解决的问题,“祝福去年一整年都耗费在这上面的人”,这是他的原话。Carmack最近表示他已经把个人工作重点放在这个问题上,结果发现已经有团队用了去年一整年的时间来研究这个问题,并且很有可能已经找到解决方案了。
这家团队是YiVian曾在去年报道过的Univrses,他们研发出专用于手机自带相机的移动端虚拟现实定位追踪。该公司一直相当低调,对外宣称他们一直在研发虚拟现实魔法游戏Wands。一年的时间专攻一件事 ,经过无数的努力,成果出来了。现在他们准备在今年2月的MWC大会上公布他们的解决方案。

Univrses CEO兼创始人Ricky Helgasson说:“这让你可以完全不受限制地四处走动。你心里面是不是在想这该多酷炫啊!达到这一步后,继续追求我们的终极目标——打造高品质头显的定位追踪系统,就是顺理成章的事了。”
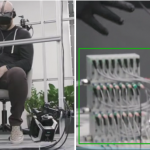
代号为“游乐场”的Univrses解决方案利用以同步位置著称(简称为SLAM )的计算机视觉技巧去判断用户的空间位置。总的来说,他们可以利用手机的相机、加速计和陀螺仪去判断手机在3D空间中的位置。在Univrses技术堆栈中,用户在游戏前可先进行定位,类似于HTC Vive设置分界线的方式。Helgesson表示这可以减轻CPU负担,留有更多的计算空间运行虚拟现实和增强现实应用,同时更加节能。
之前的系统运行的第一步需要进行一个简单的设置,通过手机相机定位,设置云数据点,然后是一个定位的步骤,包括站直,向前、左和右各走一米。利用这三个相机视角,就能定位出前后左右一米长度的空间,完成系统需要的基本参数。最后是绕着房子一圈,确定分界线。这需要你带着相机走一圈,在角落处或边界处轻拍一下。这些分界会在虚拟现实中以某种具象化形式如悬崖、墙壁或光环的形式呈现出来。Univrses的定位方式与HTC Vive的“Chaperone”系统有些相似,但是却比它更早发布。在虚拟现实的领域里永远不缺乏和你想法相似的竞争对手。

现在设置程序稍有变动。首先用户无需在使用前进行定位,它可以连续定位,代价就是耗能更快。这也就意味着到达一个场景,可以快速打开定位追踪,即使是你在飞机上,也可以迅速完成“即时初始化”。
Helgesson表示目前正基于一些特定协议和GearVR以及其他头显进行合作,打算在今年夏季前发布软件。对开发者来说,Univrses准备发布适用于任何游戏引擎的C API和匹配的Unity 插件。公司还打算在将来为其他引擎打造“ready-to-go”插件。
虚拟现实移动端目前的发展处于Oculus第一代开发包和第二代开发包间,但如果Univrses可在虚拟现实移动端中添加定位追踪功能,那么虚拟现实移动端可能可以更早成为一个杀手级平台。