认识动作捕捉系统 浅谈三种主流解决方案

查看引用和消息源请点击:映维网
本文章来自北京G-Wearables公司项目经理张莹,G-Wearables公司在研发基于惯性传感器的动作捕捉系统StepVR。
(映维网 2016年3月13日)2016年,全球范围内VR商业化、普及化的浪潮正在向我们走来。VR是一场交互方式的新革命,人们正在实现由界面到空间的交互方式变迁,这样的交互极其强调沉浸感,而用户想要获得完全的沉浸感,真正“进入”虚拟世界,动作捕捉系统是必须的,可以说动作捕捉技术是VR产业隐形钥匙。
目前动作捕捉系统有惯性式和光学式两大主流技术路线,而光学式又分为标定和非标定两种。那么我们可以将动作捕捉系统分为以下三大主类:基于计算机视觉的动作捕捉系统(光学式非标定)、基于马克点的光学动作捕捉系统(光学式标定)和基于惯性传感器的动作捕捉系统(惯性式)。接下来我们对这三种形式的动作捕捉系统进行简单的解析。
1. 基于计算机视觉的动作捕捉系统
该类动捕系统比较有代表性的产品分别有捕捉身体动作的Kinect,捕捉手势的Leap Motion和识别表情及手势的RealSense实感。

该类动捕系统基于计算机视觉原理,由多个高速相机从不同角度对目标特征点的监视和跟踪来进行动作捕捉的技术。理论上对于空间中的任意一个点,只要它能同时为两部相机所见,就可以确定这一时刻该点在空间中的位置。当相机以足够高的速率连续拍摄时,从图像序列中就可以得到该点的运动轨迹。这类系统采集传感器通常都是光学相机,基于二维图像特征或三维形状特征提取的关节信息作为探测目标。
基于计算机视觉的动作捕捉系统进行人体动作捕捉和识别,可以利用少量的摄像机对监测区域的多目标进行监控,精度较高;同时,被监测对象不需要穿戴任何设备,约束性小。
然而,采用视觉进行人体姿态捕捉会受到外界环境很大的影响,比如光照条件、背景、遮挡物和摄像机质量等,在火灾现场、矿井内等非可视环境中该方法则完全失效。另外,由于视觉域的限制,使用者的运动空间被限制在摄像机的视觉范围内,降低了实用性。
2. 基于马克点的光学动作捕捉系统
具有代表性的是美国的Motion Analysis。

该类系统的原理是在运动物体关键部位(如人体的关节处等)粘贴Marker点,多个动作捕捉相机从不同角度实时探测Marker点,数据实时传输至数据处理工作站,根据三角测量原理精确额计算Marker点的空间坐标,再从生物运动学原理出发解算出骨骼的6自由度运动。根据标记点发光技术不同还分为主动式和被动式光学动作捕捉系统。
基于马克点的光学动作捕捉系统采集的信号量大,空间解算算法复杂,其实时性与数据处理单元的运算速度和解算算法的复杂度有关。且该系统在捕捉对象运动时,肢体会遮挡标记点,另外对光学装置的标定工作程序复杂,这些因素都导致精度变低,价格也相对昂贵。
基于马克点的光学动作捕捉系统可以实现同时捕捉多目标。但在捕捉多目标时,目标间若产生遮挡,将影响捕捉系统精度甚至会丢失捕捉目标。
3. 基于惯性传感器的动作捕捉系统
代表性的产品有诺亦腾开发的Perception Neuron。
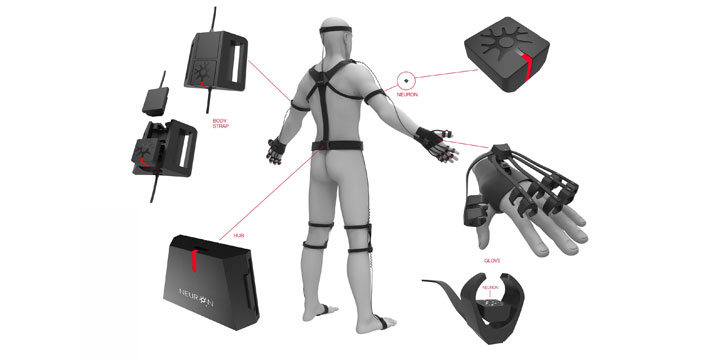
基于惯性传感器的动捕系统需要在身体的重要节点佩戴集成加速度计,陀螺仪和磁力计等惯性传感器设备,然后通过算法实现动作的捕捉。该系统由惯性器件和数据处理单元组成,数据处理单元利用惯性器件采集到的运动学信息,通过惯性导航原理即可完成运动目标的姿态角度测量。
基于惯性传感器的动捕系统采集到的信号量少,便于实时完成姿态跟踪任务,解算得到的姿态信息范围大、灵敏度高、动态性能好,且惯性传感器体积小、便于佩戴、价格低廉。相比于上面提到的两种动作捕捉系统,基于惯性传感器的动作捕捉系统不会受到光照、背景等外界环境的干扰,又克服了摄像机监测区域受限的缺点,并可以实现多目标捕捉。
但是由于测量噪声和游走误差等因素的影响,惯性传感器无法长时间地对人体姿态进行精确的跟踪。
4. 各解决方案对比
最后,我们可以通过下面的表格对这几种动作捕捉系统进行简单的对比:
| 性能指标 | 光学式非标定 | 光学式标定 | (主动) 光学式标定 | (被动) 惯性式 |
|---|---|---|---|---|
| 准确度 | 高 | 高 | 高 | 高 |
| 计算效率 | 低 | 低 | 低 | 高 |
| 可运动范围 | 小 | 一般 | 一般 | 大 |
| 多目标动作捕捉 | 低 | 一般 | 高 | 一般 |
| 环境约束 | 阳光、热源干扰 | 强光源干扰 | 阳光干扰 | 传感器噪声干扰 |
| 成本 | 低 | 中 | 中 | 低 |
除了惯性式和光学式这两条主线外,还有机械电动式、声学式、电磁式等形式的动作捕捉系统。