科学家用HTC Vive控制器改善机器人控制协调性和灵活性

文章相关引用及参考:theverge
其能够调整发送给机器人的任何动作,使其可以适应具体的功能。
(映维网 2017年10月25日)救援机器人在未来可能是非常有用的工具,可以应用于对人类来说太危险的情形。但如果你了解当前一代的机器人,你就会发现,即使是今天最先进的机器人,它们都缺乏运动所需的协调性和灵活性。为了解决这个问题,日本的一组研究人员正在尝试一种全新的机器人控制方法,亦即让人类像操纵巨大木偶一样操纵机器人。
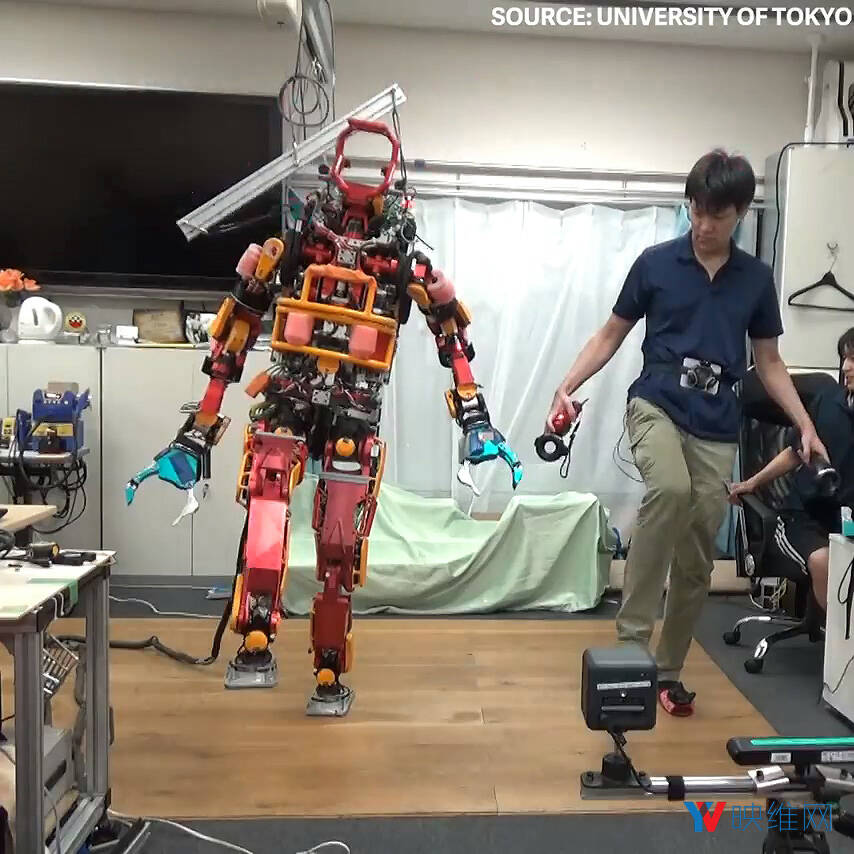
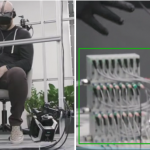
这种远程控制系统不是全新的概念,而它们通常归属于“远程呈现”的研究分支。但东京大学的科学家们表示,他们的方法比以往更为先进。早期的系统采用较小的机器人或仅控制机器人的上半部分,而他们最新的解决方案使用了HTC Vive系统的控制器和追踪器,以这种方式来控制成人般大小的机器人。
Vive的“Lighthouse”传感器可以通过红外线追踪3D空间中的控制器。通过将控制器、追踪器绑定到手和脚上,研究人员能够映射具体的动作,并其作为命令发送至机器人。但真正巧妙的部分是中间软件,其能够调整发送给机器人的任何动作,使其可以适应具体的功能。
研究员Ishiguro Yasushiro在接受采访时表示:“例如,允许以步行速度步进,但禁止奔跑和跳跃。”他指出,颠簸的运动变得平滑,快速的运动减缓了下来。“我们迫使机器人始终保持步态平稳安全。”Yasushiro承认,该系统仍然有“许多弱点”,但声称其提供比其他设计更多的灵活性和响应能力。
机器人本身早在数年前就已经制作出来,而名为JAXON的它曾经参加过DARPA的机器人挑战赛(在灾难出现的情况下测试机器人的性能)。尽管这种人形机器目前难以在现场使用,但希望将来可以变得更加方便。毕竟,如果它们能够导航专为人类建造的空间,人形机器人将会变得十分有用。
Yasushiro表示,他和他的同事目前只是掌握了双足步行的姿态,而他们希望学习更多的动作,比如上楼梯,跳跃,甚至是奔跑。虚拟现实头显可以帮助操作人员透过机器人的“眼睛”观察周围环境,而力反馈套装可以提供相应的感觉。Yasushiro说:“我们最终的目标是通过人形机器人实现人类所能做到的一切。”