利用深度学习,英特尔展示RealSense动捕解决方案

文章相关引用及参考:映维网
无标记的动捕解决方案
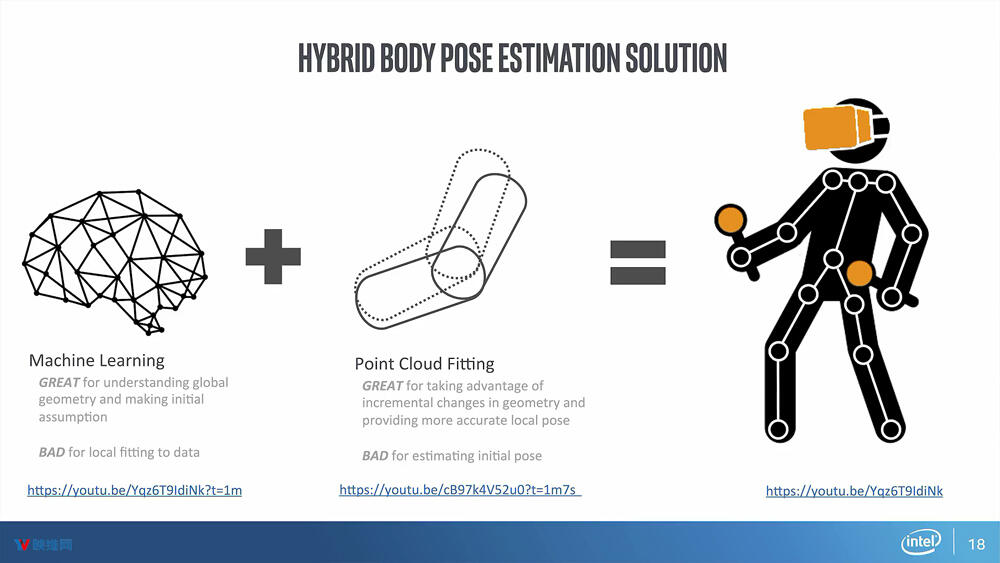
(映维网 2018年12月17日)骨架追踪于2011年左右开始成为一款可行的产品,自那以后,社区便探索了一系列不同的解决方案,但大多数都存在高计算量的问题,占用过多的GPU或CPU资源,以及是为一般的姿势估计设计。对此,英特尔团队表示“通过专注于VR/AR,我们得以利用头显的位置来训练更小的机器学习模型”。在上个月的一次Meetup活动中,英特尔RealSense CTO Philip Krejov分享了他们对卷积神经网络上的一些探索,包括集成的头部与控制器信息方法,并且介绍了他们先前仅采用CPU来实时进行手部追踪的部分研究工作。
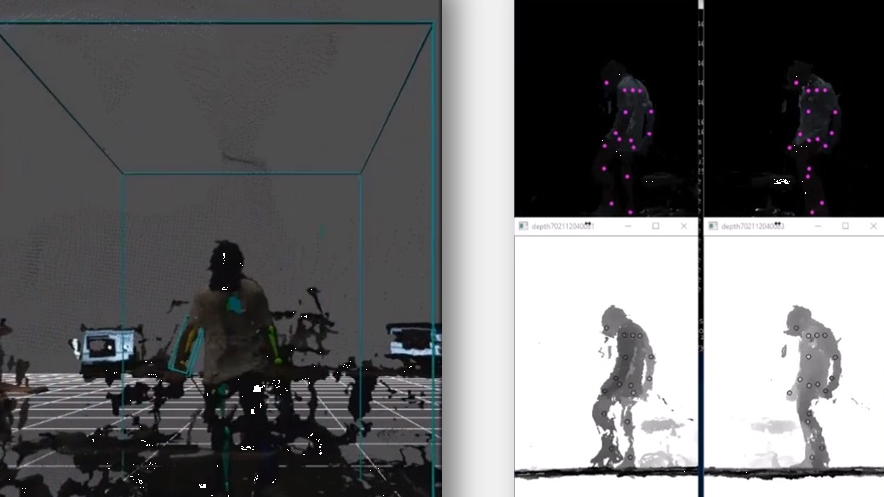
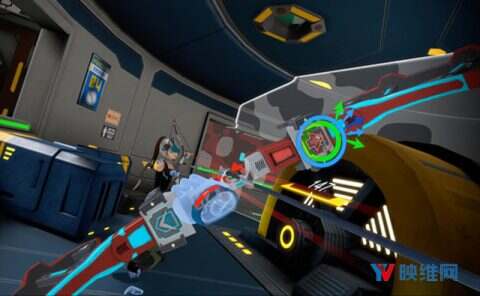
英特尔ReaSense深度摄像头允许所有这些解决方案支持多种照明环境,其采集的深度信息可实现更高的帧速率,同时无需任何额外的CPU。通过采用多个摄像头,这同时能够成为无标记的动捕解决方案,而其他体三维和表面数据则可用于一系列的用例,如游戏或社交VR。Philip列举了一个利用Unity集成开发的应用程序示例,无需任何额外的追踪设备或传感器即可支持实时交互式VR球坑模拟。
Philip Krejov在英国萨里大学获得了计算机视觉博士学位和电子工程学士学位(荣誉)。毕业后,他获得了最佳毕业论文奖。Philip是英特尔RealSense事业群的成员,负责计算机视觉领域的研究,并专注于优化人机交互。更具体地说,他正在开发用于捕捉,整理,和学习视觉数据的工具与架构。