苹果提出一种『以绝对比例确定真实对象3D重建的空间坐标』的解决方案

确定空间坐标。
(映维网 2019年10月21日)计算机视觉存在大量的用例,包括导航,对象识别,3D重建,以及增强现实等等。例如,基于视觉的即时定位和地图构建(SLAM)是一种众所周知的计算机视觉方法,它主要利用一个或多个摄像头来重建实际环境。给定一个或多个摄像头捕获的至少两个图像,典型的SLAM方法包括特征检测,描述,匹配和三角剖分等等。
在日前美国专利商标局公布的一份专利申请中,苹果提出了一种以绝对比例确定真实对象3D重建的空间坐标的方法和系统。
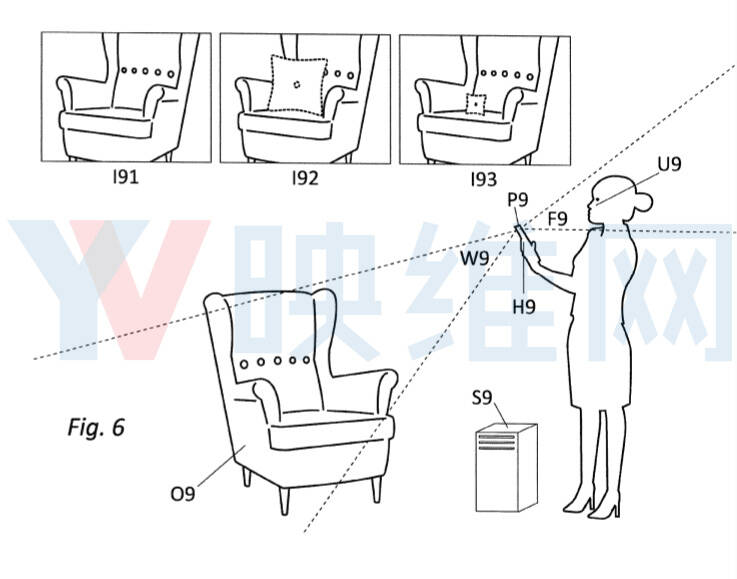
苹果解释道,以叠加虚拟家具的增强现实应用为例,如果以随机/任意比例的坐标系中执行摄像头追踪,则叠加的虚拟家具同样将具有随机/任意比例。例如,一个2米高的虚拟橱柜看起来可能是1米高的真实桌子的三倍,也可能是所述桌子的一半,这取决于在重建过程中选择的随机/任意比例。
显然,这不可取。取而代之的是,一个2米高的虚拟橱柜应该比旁边1米高的真实桌子高两倍。真实对象和虚拟对象在比例上应保持一致。为了实现这一点,有必要以绝对比例确定对象的空间坐标。
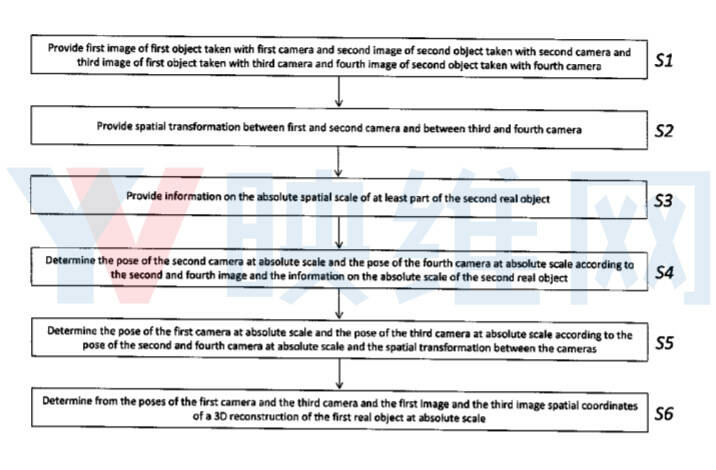
专利文件描述的方法包括以下步骤:接收包括至少一部分的第一图像信息。使用第一摄像头捕获第一真实对象,包括使用第三摄像头捕获的第一真实对象至少一部分的第三图像,包括使用第二摄像头捕获第二真实对象至少第一部分的第二图像,以及包括使用第四摄像头捕获第二真实对象至少第二部分的第四图像。
提供第一摄像头和第二摄像头之间的第一空间变换;提供第三摄像头和第四摄像头之间的第二空间变换;提供说明绝对比例的第一比例信息;提供说明绝对比例的第二比例信息;综合上述信息确定第一,第二,第三和第四摄像头姿态;综合上述信息以绝对比例确定对象3D重建的空间坐标。
名为“Method And System For Determining Spatial Coordinates Of A 3d Reconstruction Of At Least Part Of A Real Object At Absolute Spatial Scale”实际是基于2018年4月公布的专利。