微软新控制器用『绞盘』模拟逼真触觉,可将输入力放大40倍

能够将输入力放大约40倍
(映维网 2019年10月23日)在创建全新的沉浸式环境并用以支持用户探索新空间方面,社区近来取得了多个显著的进步。对于微软来说,其研究人员同样在积极地扩展和提升空间计算世界。本周,他们将在美国新奥尔良举行的2019 ACM用户界面软件与技术研讨会中展示最新的成果。其中项目CapstanCrunch是微软研究人员发明的一种全新触觉反馈控制器,通过尖端技术来模仿人类触觉。
想象一下你正常是抓握一个虚拟圆球,但如果没有触觉,你怎么知道自己成功了呢?这正是触觉控制器的作用。当你在虚拟世界中触及到任何对象时,它们会提供与之相关的感觉。但这种控制器的主要挑战是:既要产生与人手施加力一致的逼真感觉,又要保持小巧轻便的形状参数。
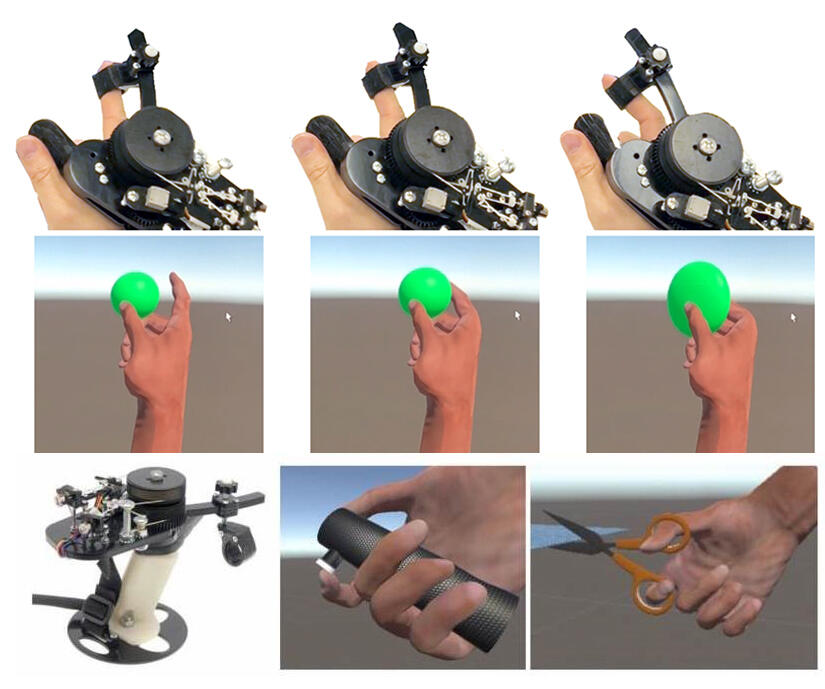
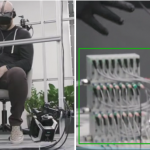
触觉控制器CapstanCrunch在触摸和抓握过程中支持人类力度,并且可以支持高达20牛顿的抓握力。基于摩擦的绞盘致动机制可以放大了小型马达的力量,从而实现了一种集成的靠接掌心型控制器设计。这种控制器可以模拟复杂的触觉事件,并表现出不同的刚度和柔韧性。
在“CapstanCrunch: A Haptic VR Controller with User-supplied Force Feedback”这个项目中,研究员Mike Sinclair, Eyal Ofek, Mar Gonzalez Franco和Christian Holz提出了一种名为CapstanCrunch的新型触觉控制器。尽管CapstanCrunch看起来可能与CLAW等先前原型类似,但不同点在于里面:一种线性和方向性的致动器,其可以承受人类力度,而且轻巧、节能、高效且坚固耐用。
设备的关键组件(也是控制器名称背后的灵感)是绞盘,绞盘是一种已有数百年历史的机械装置,其最初主要用于控制帆船绳索。高级研究员Eyal Ofek指出:“这是一种古老的技术,但我们现在正以一种不同的方式来进行运用,从而允许我们能够扩大小型马达的作用力。”
相关论文:CapstanCrunch: A Haptic VR Controller with User-supplied Force Feedback
过去的触觉控制器不得不使用大型马达来应对人手施加的力量,但它们昂贵、笨重、耗能且易损,所以不适合消费者方案。绞盘能够将输入力放大约40倍,从而允许团队应用低廉且节能的小型马达的,同时又使其能够应对人类施加的力量。
CapstanCrunch利用这项技术来提供细致的触觉反馈。与柔道的一个重要原则相似,CapstanCrunch机制利用用户自身的力量和摩擦力来最大程度地提高效率,并最大程度地减少了马达为提供反馈而需要付出的精力。与前代产品相比,CapstanCrunch具有成本低、坚固、安全、安静和快速的特点。