微软演示触觉反馈控制器PIVOT,VR中摘苹果更逼真

查看引用/信息源请点击:映维网
PIVOT属于腕戴设备,是一种包含触觉手柄的便携式组件,可根据需要在手上来回移动

(映维网 2020年10月21日)当你尝试伸手从苹果树上摘下一颗苹果时,你会获得一系列不同的感知体验,如抱握苹果时的硬度,拽拉苹果时的树枝阻力,摘下苹果后手掌承受的苹果重量,以及指尖触碰苹果时的光滑圆润等等。
微软研究院近年来在控制器方面取得了稳步的进展,而团队一直致力于实现一种能够匹配头显逼真视觉的触觉反馈。对于NormalTouch等设备,团队可以在指尖模拟虚拟对象的表面倾斜质感与纹理;CLAW能给你一种用手指抓握对象以探索其顺应性和弹性的感觉;而TORC则带来了接近于现实世界的灵活度水平。利用所述原型,你可以感知虚拟苹果皮,挤压虚拟水果,并且用手把玩移动。但为了在虚拟环境中实现与虚拟苹果的完全交互,我们必须同时考虑对象的空间动态。现在,微软提出了一种全新的控制器Haptic PIVOT,把力的物理性质带到虚拟现实控制器。PIVOT属于腕戴设备,是一种包含触觉手柄的便携式组件,可根据需要在手上来回移动。
如果牛顿需要从一颗从虚拟树上掉下来的虚拟苹果中找到关于运动定律和引力定律的灵感,他将需要一个类似于PIVOT的控制器。通过将PIVOT固定到手腕,团队可以渲染抛接对象的动量和阻力。这一切都受牛顿定律的控制,包括模拟对象到达手部时的速度:机器化的触觉手柄在需要时展开,接近并最终到达手部,从而创造从空手到握着对象的首次接触感觉,并以传统手持控制器所无法做到的方式模拟我们与物理对象的自然交互。由波茨坦大学、微软研究院、斯坦福大学和苏黎世联邦理工学院组成的团队研究了PIVOT的性能和限制,并共同撰写发表了名为《Haptic PIVOT: On-Demand Handhelds in VR》的论文。另外,所述小组将在本周举行的2020 ACM Symposium on User Interface Software and Technology (UIST)大会介绍Haptic PIVOT。

PIVOT能够按需提供关于虚拟对象的控制和触觉渲染。它包括一个通过电动铰链展开(左)和收回(右)的触觉手柄。被动桡尺铰链允许自然的手部倾斜。
1. 从物理到虚拟:按需提供
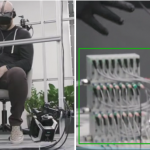
PIVOT的核心是铰链机制和触觉手柄。触觉手柄属于可换组件,能够置换为现有的控制器。但在PIVOT的研究中,团队为原型手柄配备了一个可以检测对象接触和释放的电容式触控传感器;一个用于提供振动反馈的音圈致动器;以及一个用于控制输入的触发开关。触觉手柄通过一个改进的伺服电机(驱动铰链)工作,并且可以根据需要释放到手掌,不需要时则收起以保持双手自由。这种能力让PIVOT成为增强现实或混合现实场景的理想选择。例如,你可以正常操作键盘,使用鼠标,或者处理其他物理对象。只要需要,你快速摆动手腕即可启动PIVOT,并将手柄旋转释放到手掌,这样你就可以与虚拟对象进行交互。再次摆动手腕,手柄就会收回。两个召唤动作都由一个内部加速度计进行检测。
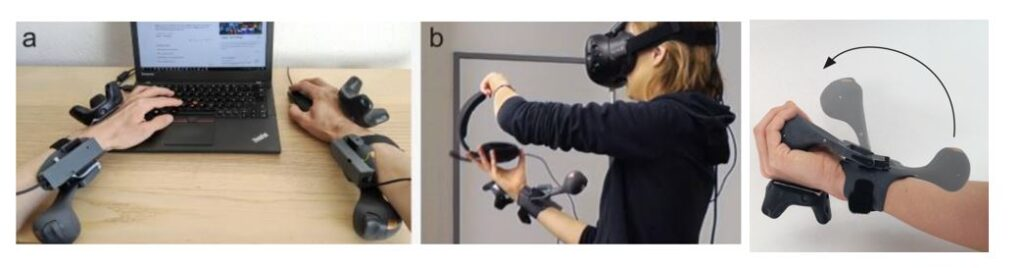
PIVOT可允许用户的双手自由活动,并在需要控制器时提供支持。手腕的快速摆动可以把触觉手柄旋转到手中。这种随需应变的能力在增强现实或混合现实场景中非常有用。
基于电容式传感器的感知,当用户握着手柄时马达就会停止运转。被动桡尺铰链可允许用户在继续握住手柄的同时左右移动(最高60度)和上下移动手腕。为了防止触觉手柄在静止位置和激活位置之间移动时撞到拇指,电动铰链会向手部倾斜,而不是垂直于手部。另外,团队设置了190度的工作范围以防止手柄在不使用时妨碍用户。
2. 原力与你同在
当与虚拟对象交互时,PIVOT将会闪耀其真正的威力。以从树上摘苹果为例。从苹果进入工作范围的那一刻起,机械、电子、固件和软件就开始协同工作,直到苹果停在用户的手掌。
诸如微软HoloLens这样的头显可以针对双手进行计算机视觉追踪,这样控制系统就可以检测到用户何时开始接触目标,比如说苹果。当苹果位于30厘米的工作半径内时,PIVOT会把触觉手柄移动到一个预备位置。当用户手部靠近苹果不到10厘米时,手柄会按比例靠近,并在用户用手指握住虚拟苹果时落在手掌。手柄的移动速度与用户伸手摘苹果的速度一样快,这样可以提供非常逼真的冲击模拟。沿手柄表面布置的四个电容式触摸区会注册用户与手柄的接触,并通过串行通信接口向虚拟手部发送信号,从而致使虚拟手部在用户真实手部握住手柄时围绕苹果闭合。使用不到1毫秒的轮询,接口提供了符合用户期望的触觉响应即时性。

当用户伸手摘苹果时(左图),PIVOT会按比例将触觉手柄旋转到用户手掌(右图)
当拽拉苹果时,你会遇到来自树枝的预期阻力,因为PIVOT会通过马达尝试将触觉手柄从用户手部拉走。这种阻力将持续到苹果从树枝分离,这时音圈致动器将产生“砰”的感觉,然后用户会感觉到苹果落在手掌的冲力和重量。PIVOT不会将手柄拉走,而是将其压入手掌,从而产生一种冲力和重量感。PIVOT可以在手掌和手指渲染这些力,因为它是基于手腕而不是手掌。只要简单地转动手部,松开手柄,你就可以把坏苹果扔到地上,或者把一个好苹果放到篮子里。另外,当戴在两个手腕时,PIVOT可以促进双手的交互,比如用手柄捡起篮子里的苹果。设备可通过同步各自的触觉反馈来呈现抓握的感觉。
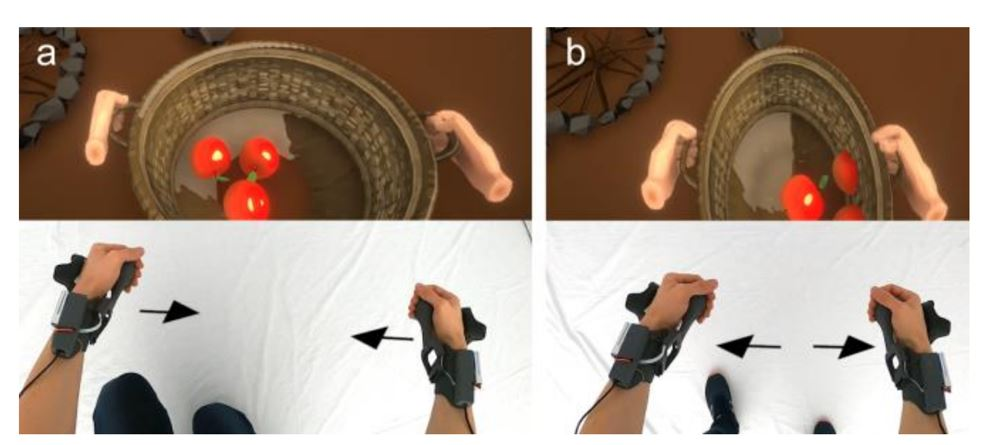
双手穿戴PIVOT可以实现双手交互的触觉反馈。在这里,被试正在拉伸和压缩篮子,设备将同步向双手渲染推拉力
3. 来玩球吧
在围绕手腕穿戴PIVOT进行设计时,团队首先考虑的是棒球。从向击球手投球,再到跑向一垒,手臂会经历很多事情。其他运动同样如此。通过纳入一种手腕形状参数或设计,设备可以在不干扰玩家周围物理环境的情况下提供更广泛的活动性。
利用PIVOT,你可以抛接虚拟对象。接住飞行中的虚拟对象的反应时间要短于抓住静止的虚拟对象(团队可以通过视觉-运动错觉来模拟以55.9英里/小时的速度投掷对象)。与模拟静止对象的抓握一样,接住虚拟对象的模拟要求PIVOT和视觉输入正确对准,从而在对象碰到手部时进行精确的渲染。可以针对高速运动实现更大的碰撞半径,从而提高设备的响应能力。
就像把苹果扔到篮子一样,投掷依靠PIVOT感知手部的运动和触觉手柄的释放。这与虚拟对象的释放相吻合。松开后,马达以物理正确的角速度(最高0.55毫秒/度)尝试将手柄从手掌中拉走。换句话说,手柄可以在340毫秒内从被抓握到完全收回(大约190度),这是眨眼所需的时间。这种人与人之间的抛接对象和传递对象模拟不仅可以用于体育游戏,而且可以扩展到虚拟工作场所内的协作。例如,在实际制造产品之前,工人或设计师可以以全新的方式感受虚拟设计或产品的力感。

PIVOT不仅可以帮助你抓握虚拟苹果,还能够允许你把苹果扔到篮子,往外抛掷苹果,以及接住飞过来的苹果。
4. 终极前沿
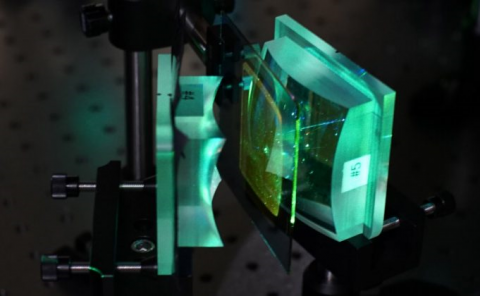
触感是渲染的终极前沿。一旦你能够在虚拟现实和增强现实中实现令人难以置信的逼真视觉效果,接下来你就要模拟与这种虚拟对象的自然交互。这时,触觉将登上舞台中心。
如今,虚拟现实的视觉效果已经能够达到身临其境和引人入胜,以至于当你戴上虚拟现实头显并进入一个苹果挂在树枝上的虚拟世界时,你会情不自禁地想伸手摘下它。但当你伸手去摘那只苹果,却感觉不到它的光滑和硬度、树枝往后拉的阻力、或者它在掌心的重量时,这种错觉就会破灭。借助PIVOT这样的触觉控制器,微软的研究人员正在努力解决这一难题。